Englisch
Englisch  Deutsch
Deutsch  Japanisch
Japanisch AB Grapher™
Visualise and analyse post-test data to confirm performance
Visualise and analyse post-test data to confirm performance
AB Grapher is a standalone application that enhances the review process during test execution by enabling parallel data analysis. It provides a comprehensive range of data channels for plotting, with configurable functions such as multi-axis plotting, filtering, and overlay, making it a versatile tool for in-depth data visualisation and analysis.
Operators can access vehicle-to-vehicle data (from Synchro), driving robot data such as brake force, pedal position, and steering angle, as well as vehicle CAN data and external sensor inputs. This capability allows engineers to quickly confirm performance and identify areas for improvement by exploring detailed test data in an intuitive, visual format.
"*" indicates required fields
Enhancing the power of Robot Controller (RC) with pass/fail results within seconds for faster decisions.
After a Special Groups library test is executed in Robot Controller (RC), Post Processor determines whether the run meets the validity requirements defined in the test protocol, such as vehicle or target speed and position, by visually presenting plots and pass/fail gradings. It also generates detailed reports summarising key test information, ensuring quick and accurate documentation.
Post Processor delivers pass/fail results within seconds for instant feedback, saving operators valuable time with on-track analysis.

"*" indicates required fields

Plan with confidence. Execute with precision.
Scenario Generator is the ultimate tool for creating and validating test paths, giving precise control over trajectory and speed for robot-driven vehicles and ADAS platforms. Easily design paths by combining predefined segments (straight lines, curves, lane changes, etc.) with customisable parameters like start speed, end speed, and lane offset.
With its built-in playback feature and aerial preview, you can visualise exactly how your scenario will unfold before hitting the track. This ensures accuracy, saves time, and reduces costly trial-and-error. Whether you’re building complex ADAS scenarios or durability test paths from recorded runs, Scenario Generator delivers precision and confidence every time.
"*" indicates required fields

Unser Spurführungsmodul erweitert die Fähigkeiten von Fahrrobotern durch Präzision und Genauigkeit.
Das optionale AB Dynamics Spurführungsmodul (Path Following) ist eine signifikante Erweiterung der Fähigkeiten unserer Fahrroboter und ADAS-Plattformen. Das Modul führt unsere robotergesteuerten Fahrzeuge und ADAS-Plattformen mithilfe der in ihnen verbauten GNSS-Trägheitsnavigationssysteme mit außergewöhnlicher Genauigkeit und Wiederholbarkeit auf einer vordefinierten Spur. Der neueste Spurführungsalgorithmus beruht auf über 20 Jahren Erfahrung und wurde bereits für eine Vielzahl von Hochleistungstests eingesetzt, darunter stationäre Kurvenfahrten, doppelte Spurwechsel, komplette Runden auf der Rennstrecke von Silverstone und ein Hochgeschwindigkeits- und Präzisions-Crashtest für NASCAR.
Die AB Dynamics Spurführungssoftware nutzt die Rückmeldungen von GNSS-Trägheitsnavigationssystemen, um die Lenkung des Fahrzeugs oder der ADAS-Plattform in Echtzeit zu korrigieren und das Fahrzeug bzw. die Plattform selbst bei hohen Geschwindigkeiten und starken Querbeschleunigungen präzise auf dem gewünschten Weg zu führen.
Kann für kurze Tests, wie den ISO-Spurwechsel, und für längere Tests, wie mehrere Runden auf einem Dauerlaufkurs, verwendet werden
Bietet erhebliche Verbesserungen bei der Genauigkeit und Wiederholbarkeit von Fahrzeugprüfungen und führt so zu Kosten- und Zeiteinsparungen
Seitliche Positionsgenauigkeit bis zu 2 cm oder besser (in einer geraden Linie).
Kann auf jeder geeigneten Teststrecke verwendet werden, ohne dass eine Änderung der Streckenoberfläche erforderlich ist
Sicherer und zuverlässiger Einsatz bei Geschwindigkeiten von über 200 km/h
Bewahrt die Stabilität durch präzise Lenkung auch bei Übersteuerung
Synchronisation mehrerer Fahrzeuge auf komplexen Spuren mithilfe der GNSS-Zeit
Die Software ist in Modulen erhältlich, die jeweils auf eine bestimmte Art von Prüfung zugeschnitten sind
Kompatibel mit den wichtigsten IMU-Anbietern wie OxTS, GeneSys und Racelogic
"*" indicates required fields

A powerful, all-in-one software application for configuring test objects, managing and running test cases.
Robot Controller (RC) is the powerhouse of the Track Applications Suite, enabling seamless configuration, management, and execution of test cases with precision and efficiency. Compatible across our full range of driving robots and ADAS test objects, RC empowers users to run everything from simple sine-dwell manoeuvres to complex, multi-vehicle ADAS scenarios. Its flexibility ensures it meets diverse track testing needs, whether for performance validation, safety compliance, or advanced driver assistance systems.
RC also includes Special Groups, a comprehensive library of preconfigured test scenarios aligned with global standards, including Euro NCAP, C-NCAP, UN, NHTSA, and JNCAP protocols, helping you achieve compliance faster and with confidence.
Tests are automatically configured based on vehicle dimensions to ensure highest accuracy and structured test lists manage the execution and tracking of the necessary tests and required test conditions. Test data can also be conveniently exported, and reports are generated using Post Processor.
By using Special Groups, operators can save months of track and planning time. Starting January 2026, the Special Groups Euro NCAP 2026 is available as an optional add-on.
"*" indicates required fields

Koordinierung und Synchronisierung mehrerer Testobjekte für eine unübertroffene Testeffizienz.
Synchro ist unsere patentierte Kommunikationssprache für die Steuerung und zeitlichen Koordinierung der Bewegungen von Testobjekten. Sie nutzt unser zuverlässiges Funktelemetriesystem TrackFi PowerMesh zusammen mit unserer fortschrittlichen Robotersteuerungssoftware (Robot Controller), um eine perfekte Synchronisierung mehrerer Objekte zu gewährleisten – selbst auf komplexen Spuren und bei unterschiedlichen Geschwindigkeiten.
Synchro erfasst in Echtzeit Fahrzeug-zu-Objekt-Daten zwischen einem Testfahrzeug und anderen Objekten. So können beliebige Kombinationen von Systemen (robotergesteuerte Fahrzeuge, ADAS-Plattformen und fahrerlose Fahrzeuge) koordiniert und mit dem Testfahrzeug synchronisiert werden. Synchro ist in den Varianten Lite oder Full erhältlich und ermöglicht die präzise und wiederholbare Durchführung jedes Laufs, was die Effizienz von Fahrversuchen erheblich steigert.
Synchro bietet eine gemeinsame Schnittstelle für alle Fahrversuchssysteme und ermöglicht die Synchronisierung von bis zu 16 Objekten, die Integration und Kompatibilität mit den wichtigsten GNSS-/IMU-Anbietern und die multidirektionale Steuerung für komplexe Verkehrsszenarien – alles Funktion, die zu effizienten und präzisen Fahrversuchen beitragen.
Eine gemeinsame Schnittstelle für alle Fahrversuchssysteme von AB Dynamics
Synchronisierung für bis zu 16 Objekten
Integration und Kompatibilität mit wichtigen IMU-Anbietern wie OxTS, GeneSys und Racelogic
Aufzeichnung von bis zu 20 Fahrzeug-zu-Objekt-Synchro-Datenkanälen
Kontrolliert den Längsbereich mit optionaler Driftkorrekturlenkung
Auslösung von Ereignissen mit einer beliebigen Kombination von Synchro-Datenkanälen
Multidirektionale synchronisierte Steuerung für komplexe Verkehrsszenarien
Schnittstelle mit RT Range und ADMA Delta
Synchro Lite ermöglicht eine einfache ausgelöste Steuerung mit nur einer IMU im Testfahrzeug
"*" indicates required fields

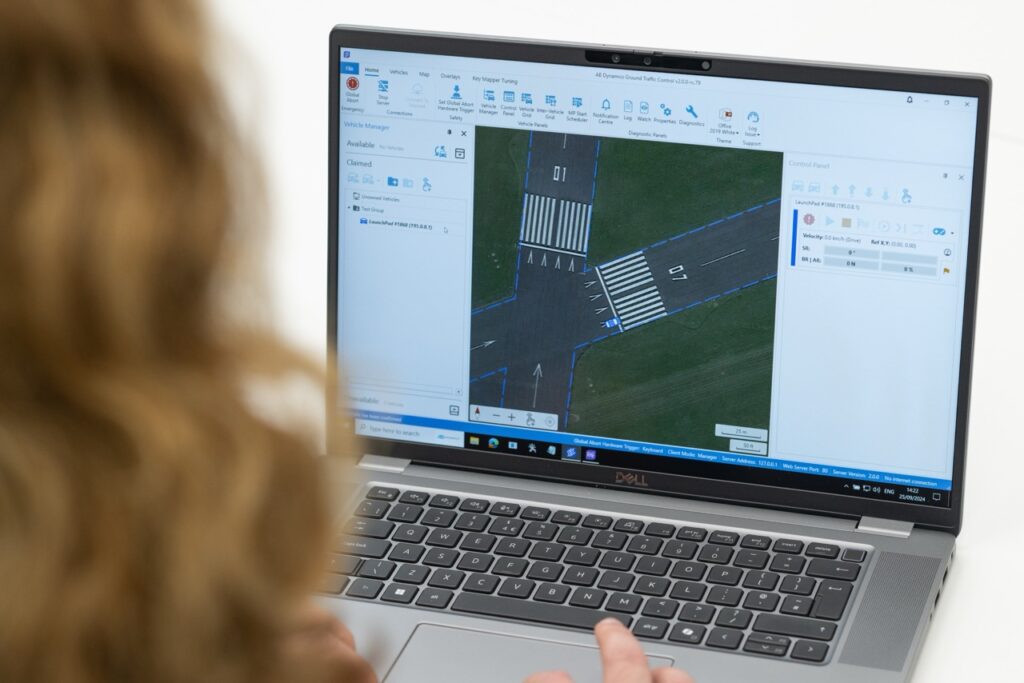
Vereinfachung des Managements, der Steuerung und Überwachung des Testgeländeverkehrs.
Ground Traffic Control (GTC) ist eine zentralisierte Plattform, die eine leistungsstarke und skalierbare Lösung für die genaue Überwachung und Koordination des Verkehrs auf Testgeländen bietet, einschließlich robotergesteuerter Fahrzeuge und ADAS-Zielplattformen.
GTC automatisiert wichtige Punkte des Testverkehrsmanagements, reduziert den Bedarf an manuellen Eingriffen und ermöglicht es den Bedienern, besser den Testbetrieb zu managen. Durch die aktive Überwachung aller Fahrzeuge und Plattformen reduziert GTC das Risiko von Kollisionen und Schäden in komplexen, stark frequentierten Testumgebungen.
GTC ist in die Track Applications Suite von AB Dynamics integriert, unser umfassendes Track-Testing-Software-Ökosystem, das alle unsere branchenführenden Anwendungen enthält. Seine skalierbare Architektur unterstützt zukünftiges Wachstum und bietet maßgeschneiderte Lösungen mit GTC Core für kleine Betriebe und GTC Pro für fortgeschrittenere Szenarien.
GTC ist in zwei Versionen erhältlich, die auf die Anforderungen Ihres Testprogramms zugeschnitten sind:
"*" indicates required fields

Sie müssen den Inhalt von reCAPTCHA laden, um das Formular abzuschicken. Bitte beachten Sie, dass dabei Daten mit Drittanbietern ausgetauscht werden.
Mehr Informationen