English
English  German
German  Japanese
Japanese GTC Remote™
用于高级驾驶辅助系统(ADAS)测试的便携式、用户友好型远程控制系统。
用于高级驾驶辅助系统(ADAS)测试的便携式、用户友好型远程控制系统。
GTC Remote 是一种无线遥控系统,可让您操作我们的 GST 和 LaunchPad ADAS 平台,包括最新的 LaunchPad Spin。它设计用于单平台 ADAS 测试,例如只需要一个平台的行人和自行车骑手测试。
GTC Remote 是由一个手持式装置组成,其将操纵杆功能与显示屏、无线电、安全控制器和基站软件集成在一起。它无需多个硬件组件,简化了测试设置和操作。
GTC Remote 是一款多功能、便携和可靠的工具,可提高高级驾驶辅助系统(ADAS)的测试效率,同时符合 AB Dynamics 一贯的安全理念。GTC Remote 的设计旨在帮助您比以往更快、更轻松地设置和运行测试场景,并具有多项优势:
"*" indicates required fields

为反馈设备和我们的换挡机器人提供快速、安全和可定制的安装方案。
我们的变换器支柱可将陀螺仪、加速计和全球导航卫星系统(GNSS)运动组件等反馈设备快速、牢固地安装在车辆上。我们提供用于安装设备的定制支架,并有多种配置可供选择。变换器支柱还可用于将换挡机器人安装在车内。
标准支柱可快速安装在汽车地板和车顶之间,并为配备全景玻璃车顶的车辆提供了选装套件。支柱独特的折叠拱形支脚可以桥接传动通道,确保最大的方向稳定性。该支柱的设计振动模式不低于 50Hz,由于采用了弹簧预紧机制,因此可以承受加速度、冲击和车身变形。
"*" indicates required fields
通过数据和视频的无缝同步,精简无人驾驶测试。
通过 Capture + Review 功能,您可以通过测量到的动态数据记录车辆内外的视觉事件。它是捕捉警示灯触发准确瞬间的重要工具。
Capture + Review 是一款视频采集套件,可与我们的驾驶机器人无缝配合。它可以录制和同步多达四个摄像头的视频,并将其与驾驶机器人和其他传感器(例如运动组件)的数据一起存储。通过这种方式,您就无需在后期处理和手动同步视频数据上浪费时间了。您可以立即享受无缝审查体验。
Capture + Review 还可让您将多个视频流与驾驶机器人和机器人控制器(RC)软件屏幕输出的数据结合起来。您可以创建一个单一的视频输出,在同一位置显示您需要的所有数据流。Capture + Review 功能简化了报告生成过程,以易于理解的视频文件说明数据。 该工具可立即对车辆性能进行评估,因此对于评估新车评价规程(NCAP)测试场景非常有用。
Capture + Review 可实现数据和视频的无缝同步,是创建演示文稿和说明测试性能的完美工具。
适用于任何一款 AB Dynamics 驾驶机器人
与任何 USB 摄像头兼容
同时审查数据和视频
将多个视频流与驾驶机器人的数据整合在一起
可定制视频布局,最多可有四个视频源(摄像头和屏幕截图)
允许在视频上叠加用户选择的数据通道
可对车辆或高级驾驶辅助系统(ADAS)性能进行精确评估
完美的视频记录和车辆测试证据
"*" indicates required fields

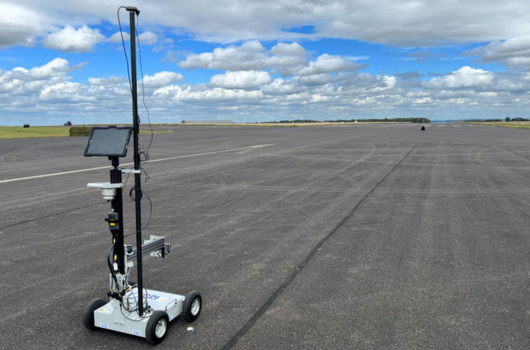
高级雷达测量可精确校准高级驾驶辅助系统(ADAS)的目标和真实物体,便于携带,多传感器同时使用,确保能进行全面分析。
ScanR 是一款先进的工具,设计用于提供精确一致的雷达以及光检测和测距(LiDAR)测量。
通过利用差分 GPS/IMU 和全自动驾驶与转向装置,它收集 360 度全方位扫描数据,并用于校准和验证包括 ADAS 目标、VRU 和真实物体在内的各种物体。
它符合欧洲新车评价规程(NCAP)、国际标准化组织(ISO)和美国汽车工程师学会(SAE)的规定,可确保准确的物体测量并记录传感器相对于目标的位置和方向。
推车便携、轻便、可折叠、防水,非常适合运输和储存。
ScanR 的突出性能是能够使用多个传感器同时进行测量。
其软件支持固定距离和固定角度测量,可对目标的 RCS 特性进行全面分析,并模拟目标与车辆之间的相互作用。
推车配有一个用于校准和分析软件的 Trihedral,便于查看和对比测量数据。
它可以安装各种附加雷达传感器和传感器技术,例如光检测和测距(LiDAR)或视觉传感器。
还可提供诸如球体和二面体的其他校准对象,并且推车可与其他 DGPS/IMU 系统集成。
ScanR 可从各种视角进行 360 度扫描和径向扫描,无需消声室或转盘,进一步增强了其多功能性。

"*" indicates required fields

Flex-0 是一种可替代机器人的紧凑型解决方案,可实现对车载执行器的线控驱动,非常适合路径跟随应用和完全无人驾驶操作。
Flex-0 提供接口硬件,让业界领先的 AB Dynamics 路径跟随和无人驾驶控制软件能够直接控制车辆,使得无人驾驶测试可以除安全制动执行器之外无需其他机器人。通过移除机械机器人,该系统对滥用测试过程中的高冲击力具有更强的承受能力,从而降低了硬件损坏的风险。
Flex-0 使用汽车制造商的标准 CAN 控制信息来控制其车辆,从而大大降低了硬件成本和设置时间,并在同时保持其线控驱动接口对第三方的保密性。
Flex-0 适用于自动驾驶汽车测试,其采用精确的路径跟随精度以及我们的 Synchro 技术,可以精确地再现模拟场景并用于自动驾驶车辆控制系统的关联和验证。 在无人驾驶测试方面,与 AB Dynamics 的所有无人驾驶系统一样,我们的 S-Brake 系统提供了二级冗余安全保障,确保在发生问题时车辆能够自动停止。
Flex-0 是一种全面的无人驾驶测试解决方案,无需人类驾驶员和机械机器人。
"*" indicates required fields

通过控制车辆的车载执行器,线控驱动为驾驶机器人提供了一种安全、紧凑的替代方案,可实现精确的车辆控制、同步和安全的无人驾驶测试。
线控驱动解决方案实现了对车辆系统的电子控制,无需额外的机械控制。由于车辆是由 CAN 信息控制,线控驱动为汽车制造商提供了安装驾驶机器人的替代方案。这项技术大大提高了效率,简化了安装和测试流程,同时保留了车辆测试所需的精确控制。更少的硬件也意味着更低的成本和更快的安装时间。
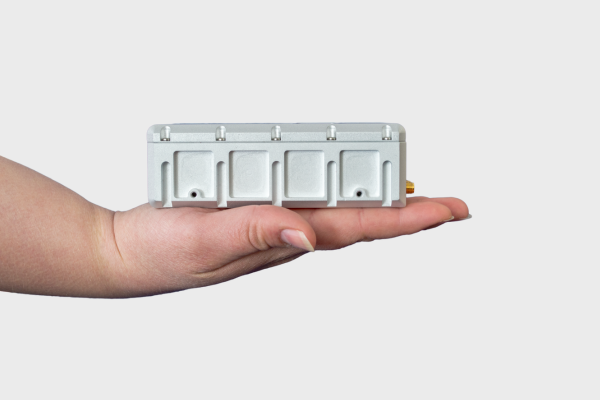
用于车辆测试的超小型 GNSS 运动组件。
PinPoint 是一款 GNSS 运动组件,可高度准确地测量车辆的位置和运动。作为车辆测试的终极运动组件,PinPoint 结合了 OxTS 技术的精华与 AB Dynamics 的专长和创新。凭借四星座 GNSS 接收器和高性能惯性传感器,PinPoint 可提供 2 厘米的定位精度,为无人驾驶测试、车辆耐久性和滥用测试、高级驾驶辅助系统(ADAS)和新车评价规程(NCAP)测试等各种车辆测试提供快速、精确的测量。
PinPoint 体积小、重量轻,易于安装在车辆上,提高了测试过程中的灵活性和可用性。该设备与我们的驾驶机器人和 ADAS 平台兼容,确保了无缝集成和同步,有助于精简测试流程。通过以太网和可选的 CAN 输出,PinPoint 的连接性和接口可满足不同的 ADAS 测试要求。



"*" indicates required fields

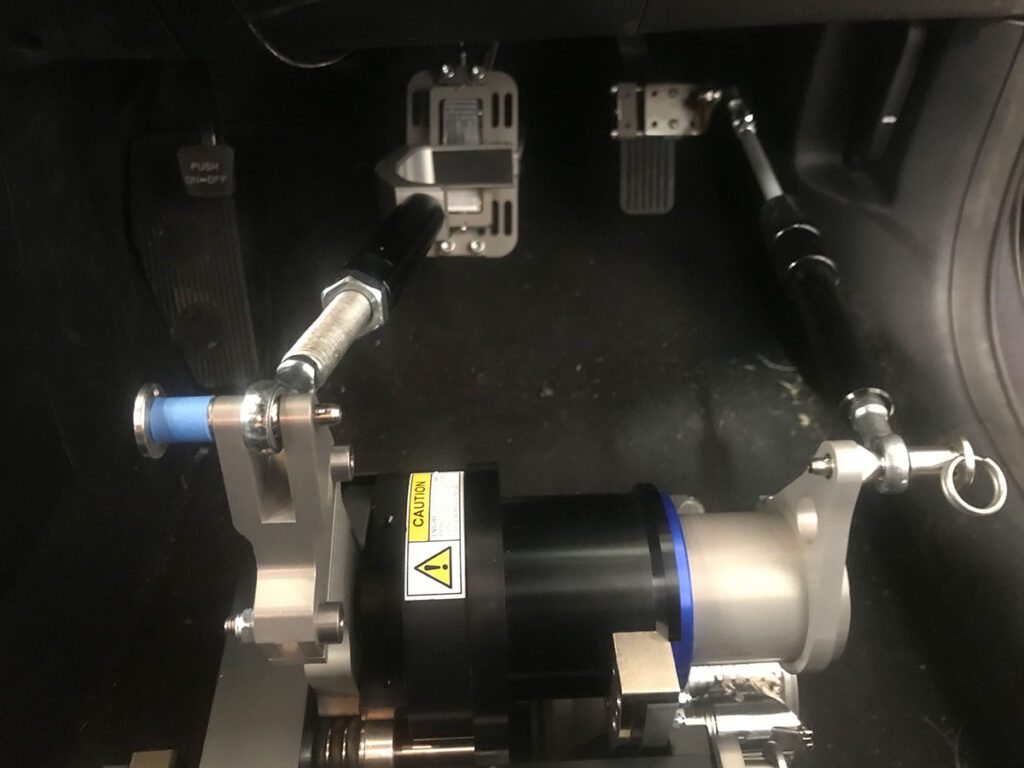
AR 油门踏板机器人既可控制油门踏板位置,也可控制车速,它使用一个紧凑型旋转执行器来精确控制油门踏板。
AR 油门踏板机器人可进行调节以适应大多数车辆,既可用于右舵汽车,也可用于左舵汽车。安装后,驾驶员也可以正常驾驶。AR 与转向机器人以及我们的路径跟随软件配合使用,可以再现人类驾驶员的速度曲线,例如在赛道上跑圈。另一个典型应用是控制转向或制动测试的进入速度,在测试过程中减小油门。与我们的其他踏板机器人一样,AR 可通过我们的机器人控制器(RC)软件轻松配置和控制,该软件提供符合 C-NCAP、欧洲 NCAP、JNCAP、NHTSA 测试场景和联合国要求的预定义模板,以及自定义选项。
"*" indicates required fields

CBAR 600 是一款结构紧凑的多功能机器人,具有精确、可靠和高效等特点。
通过其地板固定式执行器的设计,制动和油门踏板组合式机器人(CBAR) 600 可精确、可靠、高效地执行车辆速度控制测试。无论您是需要符合新车评价规程(NCAP)的要求、评估踏板感觉,还是探索无人驾驶测试的全新可能性,CBAR 600 都能准确控制车速,是任何需要准确、可重复车速控制的测试的最佳选择。
CBAR 600 具有可控性、多功能性和用户友好性,能够快速踩下大多数车辆的制动踏板或油门踏板,并可以通过我们的机器人控制器(RC)软件轻松配置和控制,该软件提供符合 C-NCAP、欧洲 NCAP、JNCAP、NHTSA 测试场景和联合国要求的预定义模板,以及自定义选项。CBAR 600 还可升级用于无人驾驶测试,如果与我们的任何转向机器人结合使用,CBAR 600 可成为路径跟随、车辆动力学或制动辅助测试的理想选择。
"*" indicates required fields
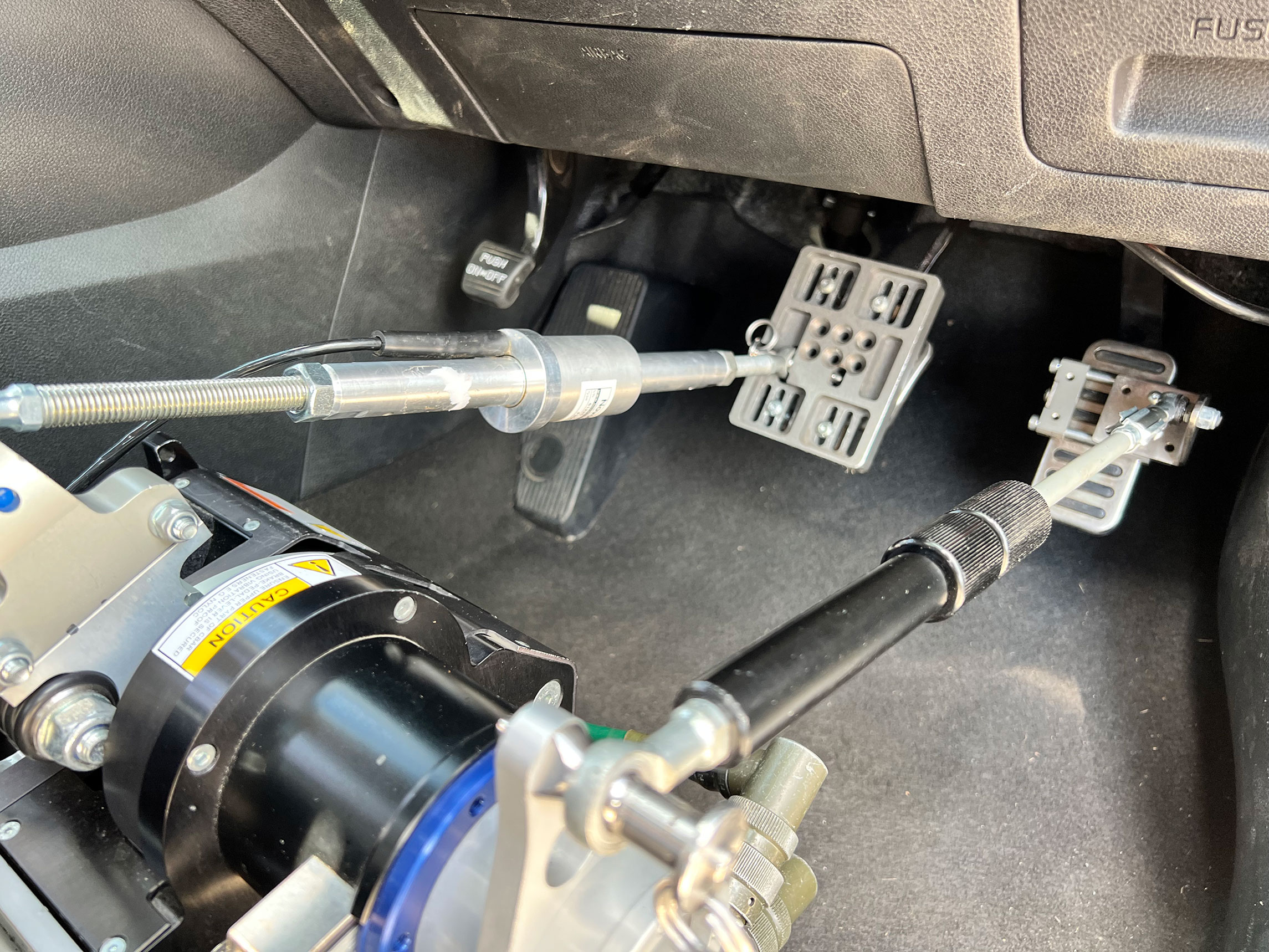
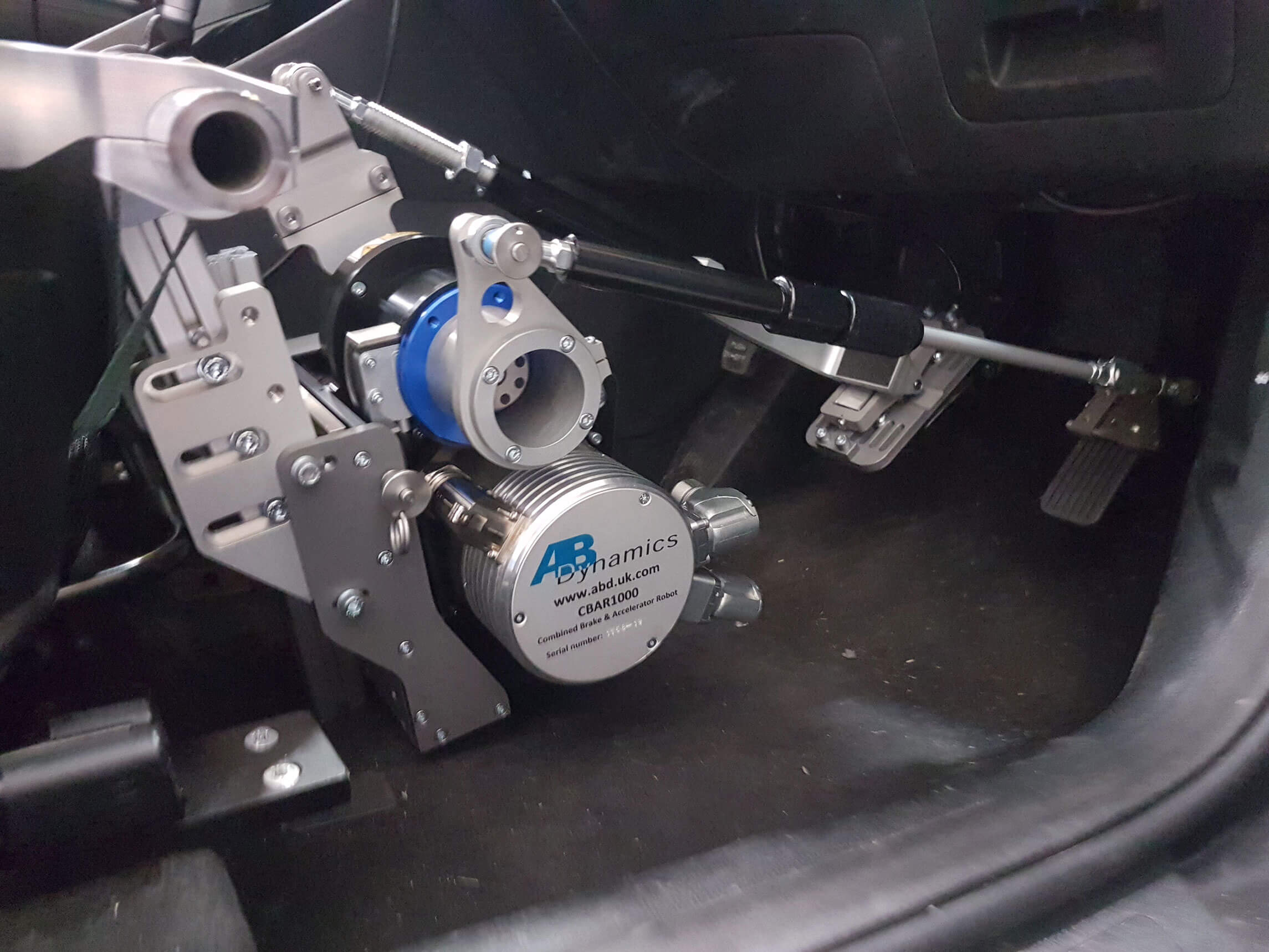
作为一款强大和可靠的机器人,CBAR 1000 可以执行各种制动和车速控制测试。
在需要更大制动力的情况下,作为 CBAR 600 的老大哥,制动和油门踏板组合式机器人(CBAR) 1000 具有足够的动力来进行激进的制动测试。CBAR 1000 是专为需要高制动力和高踏板速度的高性能车辆设计的,可提供高达 1300 N 的制动力和 800 毫米/秒的踏板速度。通过增加一个可选的安全制动器,CBAR 1000 可用于无人驾驶应用。
这款踏板机器人还适用于普通车速控制和高级驾驶辅助系统(ADAS)测试。与 CBAR 600 一样,CBAR 1000 也采用了地板固定式执行器设计,并可以通过我们的机器人控制器(RC)软件轻松配置和控制,该软件提供符合 C-NCAP、欧洲 NCAP、JNCAP、NHTSA 测试场景和联合国要求的预定义模板,以及自定义选项。这一功能不仅能为操作员节省时间和精力,还能对测试标准进行更灵活的控制。
"*" indicates required fields
You need to load content from reCAPTCHA to submit the form. Please note that doing so will share data with third-party providers.
More Information