English
English  German
German  Japanese
Japanese 
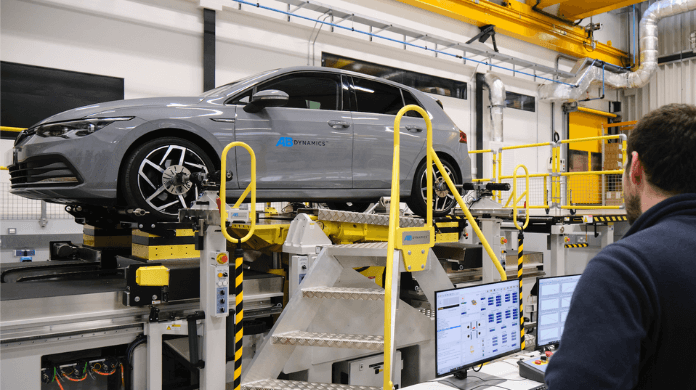
In this blog post, we look back at how we designed the gearshift robot. At the time, there were one or two other devices on the market which were used in chassis dyno testing, where the vehicle is stationary in a test lab. These used heavy and complex mechanisms to move the gearstick through its range of motion, and didn’t allow you to sit in the driver’s seat.
Our driving robots are designed primarily for use on a test track, and they are all designed to allow a human driver to sit in the vehicle. Even if you plan to perform your tests with no-one onboard, it’s always an advantage to be able to jump in the car and drive normally between tests.
We set out to design an actuator that was simple, lightweight and could be installed in almost any vehicle. And just like our other robots, it had to accommodate a human driver.
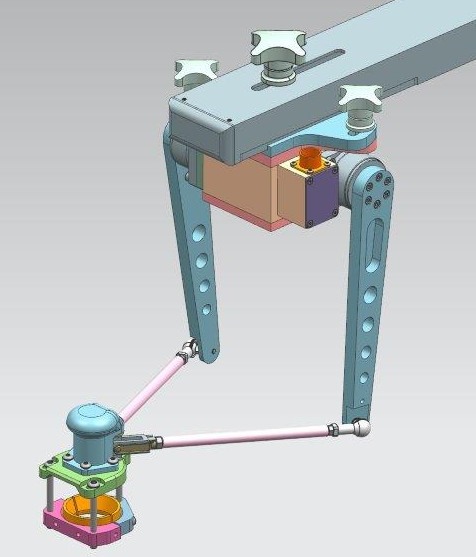
After looking at a number of arrangements, we settled on our basic design. By using a pair of actuators, each with a rotary lever which is linked to the gearknob, we can achieve a full range of x-y motion.
One challenge was to be able to mount the actuator in the vehicle. Another common thread across our driving robot range is the ability to mount in almost any vehicle without the need for custom bracketry or drilling holes. We chose to use our ultra-rigid transducer strut as the basis for installing the gear robot.

From the prototype above, we made various refinements to arrive at our finished design.
The links feature quick-release couplings, so that you can unhitch the robot from the gearknob.

We added a gear knob on top of the clamp which attaches to the vehicle’s gearstick, to make it easier for the driver to change gear.

The gearshift robot was one of the stars of the show when our robots featured on a Guy Martin tv special. We used robots to convert a standard Ford Transit van into a driverless car, and Guy was blown away by how fast the gearshift robot could change gear.